




Kiểm tra ngoại quan, phát hiện lỗi, phân loại sản phẩm tự động bằng công nghệ xử lý ảnh công nghiệp
Trong hoạt động sản xuất hàng ngày, bạn sẽ gặp phải nhiều bài toán như:
-Trên bo mạch điện tử của nhà máy chúng tôi có rất nhiều link kiện PCB, tuy nhiên không biết vì một lý do nào đó, có 1 số board bị thiếu linh kiện, làm sao để phát hiện và loại bỏ chúng?
-Nhà máy chúng tôi gia công ra các chi tiết đúc nhựa và chúng tôi phải kiểm tra 100% kích thước của chúng liên tục, công nhân của chúng tôi không thể làm nổi việc này!
-Nhà máy chúng tôi sản xuất linh kiện ô tô, sản phẩm trên băng tải và chúng tôi muốn robot nhận dạng gắp nhả và sắp vào khay sản phẩm!
-Trên sản phẩm của chúng tôi có in ngày tháng sản xuất và hết hạn, sản phẩm của chúng tôi xuất đi Châu Âu và chúng tôi không muốn các sản phẩm đó in sai ngày hoặc bị mờ!
-Trên bao bì chúng tôi sản xuất ra có in logo, tuy nhiên, đôi khi nó bị mờ hoặc mất nét in, chúng tôi không muốn sản phẩm này đến với người tiêu dùng!
-Trên bao bì chúng tôi có barcode, chúng tối muốn đọc tự động và tìm ra sản phẩm có barcode chưa đúng, bị mờ, bị mất nét!
…
Chúng tôi không muốn sử dụng con người vào các việc trên, vì số lượng sản phẩm sản xuất ra quá lớn, chúng tôi phải thuê rất nhiều người. Đôi khi việc nhầm lẫn do họ mệt mỏi hoặc cảm xúc không tốt là rất hay xảy ra, năng suất vì đó mà thấp!
Nếu bạn thật sự gặp các vấn đề trên, giải pháp cho các bạn là “Cảm biến hình ảnh thông minh”- từ đơn giản “Vision Sensor” tới “Vision Machine” . Vision sensor được hiểu là (hệ thống) thiết bị cảm biến, phân biệt tính đúng sai của hình ảnh. Hiểu đơn giản hơn Vision sensor thực chất chỉ là một cảm biến quang nhưng có khả năng tạo ra ảnh nhưng chứa đựng nhiều thông tin hơn so với cảm biến thông thường. Tùy hãng sản xuất, một camera duy nhất có thể kiểm tra được nhiều vật cùng lúc (yêu cầu tất cả vật cần kiểm tra nằm trong vùng nhin) và nhiều lỗi hơn có thể được phát hiện đồng thời, hay chỉ 1 vật vật duy nhất.
1. GIẢI PHÁP VÀ ỨNG DỤNG
Giải pháp từ Cảm biến thường được chia thành các ứng dụng chính Guildance – Inspection – Gauge – Identification (GIGI)
–Guidance: Ứng dụng Vision senso dùng để định vị trí sản phẩm (tọa độ X, Y và góc nghiêng) , thường được sử dụng kết hợp với robot để tạo ra 1 giải pháp hoàn chỉnh cho hệ thống, có thể gọi đây là “mắt thần” của robot. Vision sensor chụp ảnh và xác địch tọa độ của vật thể, từ đó robot nhận dạng được vị trí của vật và di chuyển đến để gắp, thường thì các vật thể được phân bố rất lộn xộn, ngẫu nhiên. VS và robot giao tiếp với nhau qua truyền thông. Hiện nay có 1 số nhà sản xuất robot tự phát triển dòng VS của riêng họ, hoặc có thể kết hợp với một hãng sản xuất VS khác.
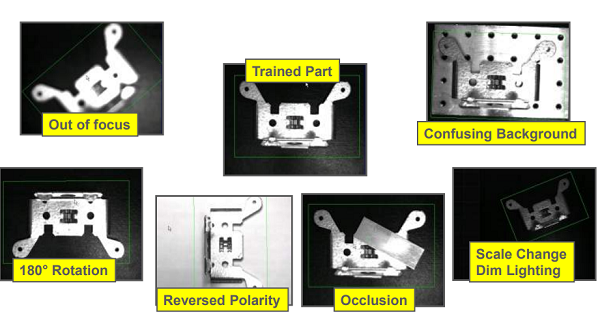
–Inspection: Ứng dụng kiểm tra hình ảnh trên sản phẩm, ví dụ như: logo, hình được in trên sản phẩm, màu sắc, bề ngoài, hình dáng sản phẩm (bị móp méo, hở nắp đậy, bo mạch thiếu linh kiện…) Nguyên lý hoạt động của dòng này là chụp ảnh sản phẩm mẫu, lưu vào thư viện, khi hoạt động, Vision sensor sẽ chụp ảnh các sản phẩm chạy qua nó và so sánh với ảnh gốc, bộ xử lý của Vision sensor sẽ xuất ra tín hiệu OK hoặc NG.
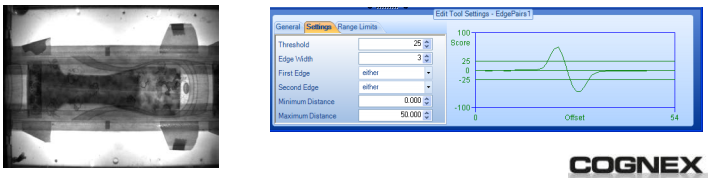
–Gauge: Ứng dụng đo kích thước: kiểm tra, đo kích thước chính xác của sản phẩm cũng như đảm bảo dung sai trong vùng cho phép.
–Identification
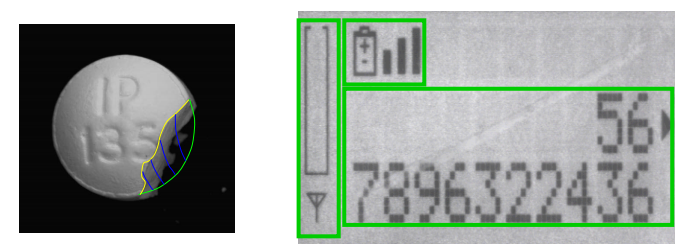
-Ứng dụng Vision sensor đọc barcode
-Ứng dụng OCR (Optical Character Recognition- Nhận diện ký tự quang học) dùng để đọc các ký tự được in hay khắc trên bề mặt sản phẩm.

Các ký tự in trên sản phẩm, sau khi được chụp bởi Vision sensor thực chất sẽ trở thành 1 hình ảnh, nhiệm vụ của bộ điều khiển lúc này phải phân tích hình ảnh này trở thành chuỗi ký tự (việc này giống như đọc biển số xe). Mục đích của VS OCR là đọc chữ, số, ví dụ như ngày tháng sản xuất và hết hạn, so với ngày được cài đặt (các bộ điều khiển được tính hợp sẵn thời gian thực, qua đó kiểm tra luôn ngày sản xuất của sản phẩm thực tế)
(Xem thêm về công nghệ OCR nhận diện ký tự quang học)
2. MỘT SỐ HỆ THỐNG XỬ LÝ ẢNH CÔNG NGHIỆP
Bao gồm :
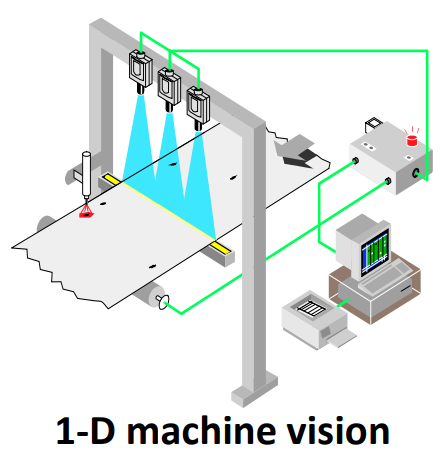
-Hệ thống xử lý ảnh 1D
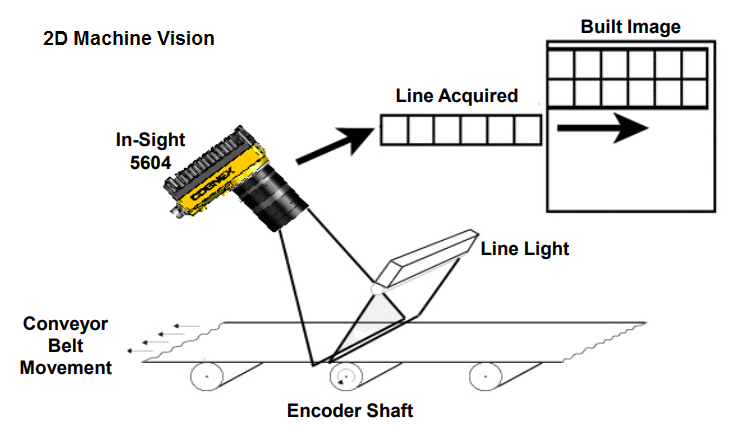
-Hệ thống xử lý ảnh 2D
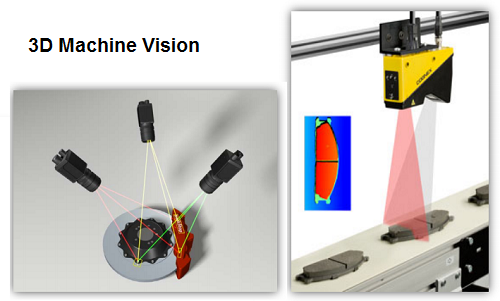
-Hệ thống xử lý ảnh 3D
3. PHẦN CỨNG CẤU THÀNH MỘT HỆ THỐNG XỬ LÝ ẢNH CÔNG NGHIỆP
Cơ bản của hệ thống kiểm tra ngoại quan gồm 4 thành phần chủ yếu sau:
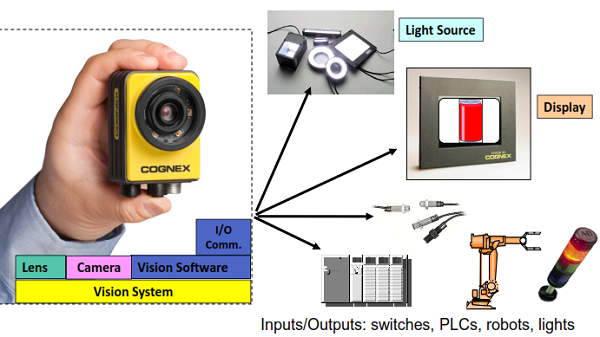
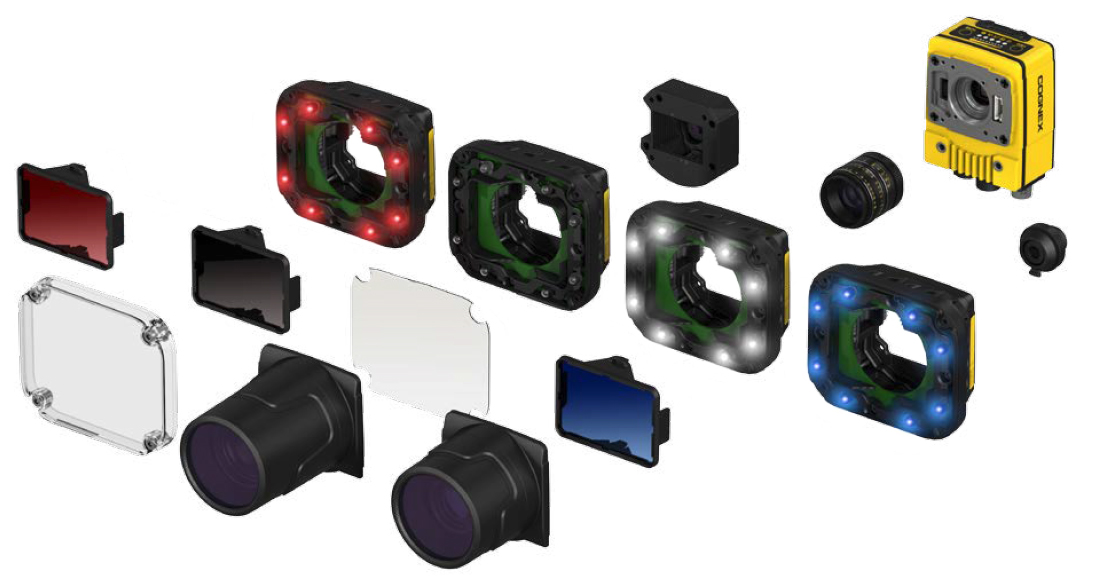
a) Máy ảnh công nghiệp: nhiệm vụ chụp hình đối tượng cần kiểm tra, camera này có nhiệm giống như camera kỹ thuật số bình thường nhưng khác là có thêm chức năng trigger chỉ chụp hình khi có tín hiệu kích (trigger) từ cảm biến hoặc từ phần mềm. Máy ảnh công nghiệp thường có kết cấu nhỏ gọn, có tốc độ chụp ảnh cao, nhiều máy có độ phận giải rất cao để phụ vụ kiểm tra những lỗi cực nhỏ.
b) Đèn chiếu sáng: đây có thể xem là phần quan trọng không thể thiếu của hệ thống ngoại quan, có nhiệm vụ làm nổi bật các lỗi cần kiểm tra và loại bỏ các nhiễu không cần thiết giúp quá trình xử lý ổn định hơn. Đèn có nhiều loại với hình dạng kích thước khác nhau, tùy theo ứng dụng sẽ chọn các đèn phù hợp.(Xem thêm lựa chọn hệ thống đèn VST)
c) Sensor (cảm biến): phát hiện vật đã vào trong vùng nhìn của camera và kích (tạo ra tín hiệu trigger) cho camera chụp. Tín hiệu trigger được tạo ra khi sản phẩm chạy qua cảm biến nhận biết vật thể (laser, quang, tiệm cận…), cảm biến này có nhiệm vụ báo cho camera biết là sản phẩm đã vào đúng vùng chụp và camera sẽ chụp ảnh lại.
d) Phần mềm xử lý ảnh: chứa các thư viện xử lý ảnh, chức năng là dùng các hàm trong thư viện để xử lý ảnh thu được từ camera. Bộ xử lý này có thể được tích hợp trên camera, 1 bộ phận tách rời hoặc có thể là một PC bình thường. Trên bộ xử lý có các tin hiệu I/O nhằm giao tiếp với PLC hoặc cơ cấu chấp hành
Ngoài ra, hệ thống kiểm tra ngoại quan sẽ thường phối hợp với các cơ cấu chấp hành: phân loại sản phẩm sau khi đã kiểm tra. Nếu sản phẩm sai sẽ được loại ra khỏi dây chuyền và sản phẩm đúng được giữ lại. Cơ cấu này tùy theo dây chuyền sản xuất có thể là robot gắp vật, cơ cấu gạt, bộ đẩy bằng khí nén…
Xem toàn bộ dòng sản phẩm Camera / Cảm biến hình ảnh Cognex
(Nguồn: Fanpage Giải pháp tự động hóa)





